Monocular Vision Double-container Controller
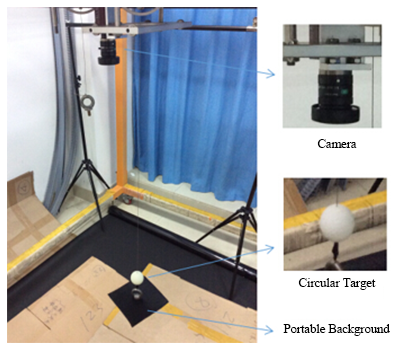
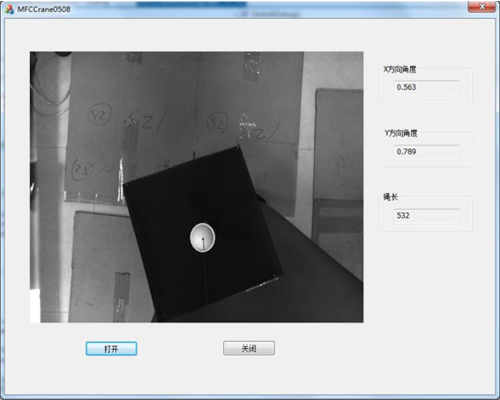
Traditional detection strategies have the dead-zone problem with mechanical sensors. Therefore, in this project, an improved Randomized Hough transform for circle detection using vertical gradients, was proposed to efficiently detect moving circular targets in a complex background with high accuracy, and an interactive program with C++ was designed.

The pipeline for the algorithm includes: Cropped out an interest area including circular target according to depth map, followed by filtering and edge detection. Then the algorithm calculated the center of circle with module mentioned above and finally scaled the position to the real world. Compared with cv.HoughCircles, the runtime decline from 0.037s to 0.018s.
We added linear interpolations between neighboring frames to support precise control for an overhead crane system while using less hard thresholds. Finally, one paper was published and a Chinese patent of invention was granted on the basis of the above research.